チューニングを楽しむための動的感性工学概論 §14
ステアリング特性総集編。加速旋回時のヨー変化と動的感性の関係を考える。
この講座では、§11から3回にわたって、加速旋回時のステアリング特性をテーマに、幾何的な内容からはじめ、タイヤと路面の接点で何が起こっているか、4輪のSA(スリップアングル)がどのように変化するかなど、色々な視点でお話ししてきました。ステアリング特性は、自動車雑誌の試乗インプレッションなどでも取り上げられることの多い代表的な操縦特性ですが、どうしてそうなるかという自動車工学的な理屈を考えると、結構複雑であることがお分かりいただけたと思います。
しかし、私自身の関心事という意味では、ここまではまだ予備知識の段階に過ぎません。今回は、ステアリング特性の総集編として、それがドライバーの感性にどう影響するのか…言わばドライバー側からの目線での意味を考えてみたいと思います。つまり、この講義の本来のテーマである「動的感性」という視点からのアプローチです。例によって少し面倒な理屈もこねますが、できるだけ簡略化してご説明しますので、我慢してお付き合いください。
■ドライバーの目線で見るステアリング特性の違い
以前の講義で「クルマの旋回とは、自転と公転が組み合わされた運動」と説明しました。月が自転しながら地球の周りを公転するような関係です。クルマがコーナーを曲がるのを上空から見れば、その軌跡は、月の軌道と同じような弧を描くはずです。もしも途中で加速した時には、その旋回軌道の半径が膨らむか狭まるか、それとも変わらないか…それが公転という視点でのクルマのステアリング特性です。言わば宇宙からの視点での見え方です。では、同じ運動を月からの視点で見たらどんな景色になるでしょうか?きっと、地球が月の周りを回転しているように見えるはずです。だとしたら、どこかの時点で加速した場合、その景色は、どのように変化するのでしょうか?正確にはクルマの旋回メカニズムとは異なりますが、そう考えると、クルマのステアリング特性をドライバーの目線で見るという今回の考え方のイメージをつかんでいただくのには役立つと思います。
実際には、クルマがカーブに進入する場合、とりあえずのきっかけとして必ずステアリングを回します。その時、ドライバーの目線に映る景色はどうなるでしょう?これまで前後方向に接近してきた景色が、横に流れ始めます。前進しながらなので感じにくいかも知れませんが、クルマが自転し始めたからです。疑似的には、カーナビの画面をヘディングアップにしていれば、クルマの自転とは反対方向に地図が回転することで、その様子を確認することができます。これが、クルマの自転運動、以前からたびたびお話ししている「ヨー」という運動です。
最新の実験機材を使えば、このヨーの実態を精密に測定することは可能ですが、人間の感覚としては、ほとんどが視覚への入力から判断していると考えられます。ドライバーの操舵に対して、どの程度のヨーが、どういうタイミングで出現するか…これはクルマを操るうえでは重要な指針であり、様々な設計要素の判断材料になるのですが、ここではステアリング特性に焦点を当てて、さらに分析を進めます。
コーナリング中の車には、ステアリングの舵角を一定に保っていても、必ずヨー角が発生していることは既に何回もご説明してきました。ただし、前後輪に発生するCFの大きさと重心位置からの距離との積によるヨーモーメントを起源とする説明は、公転的視点によるものです。そのさらに源をたどると「旋回(公転)による遠心力」を原因としているからです。もちろんこの理解も間違いではない事実です。
しかし、別の視点から説明することもできます。それは「駆動力」によるヨーモーメントの生成です。アクセルを踏むというドライバーの動作が、直接的にクルマの自転を促し、それをドライバー自身の視覚で確認するというサイクルが存在するのです。これは、まさしく動的感性工学のテーマですが、それを説明する前に、やはりここでも自動車工学的な基礎知識が必要になると思います。アクセルを踏むと、なぜ、クルマはヨー運動を強めるのでしょうか? 以下、原理的な部分に絞って単純化して解説します。
■駆動力によるヨ-の発生とステアリング特性
コーナリング中には、駆動輪には既にSAが付いているので、アクセルを踏むと駆動力の中心の合力が重心より外側に向いて働くことでヨーモーメントを発生させ、その力がヨー角を増大させるのです。
また、FRもFFも旋回状態では、遠心力によって内輪よりも外輪の接地荷重が大きくなっているので、駆動力は接地荷重が大きい外輪のほうに大きく発生します。ですから、実際には、重心からもっと離れたタイヤの位置で、重心点を軸として車体を回そうとするヨーモーメントが発生していることになります。これが「アクセルを踏むとクルマのヨー(自転)角度が増える」理由です。

余談ですが、以前、開発の現場でエンジンの開発スタッフに、コーナーが速く曲がれないのはサスペンションのせいだ、シャシが悪いと言われたことがあります。シャシ側の私は、ロータリーエンジンの低速トルクが少ないからだ、トルクが出るエンジンを作らないからコーナーが遅いんだと反論しました。駆動力の大小によって、ヨーモーメントが変化することを伝えたかったですが、なかなか理解してくれませんでした。アクセルを踏み、駆動力をかけることによって、駆動力が大きければ大きいほど、ヨーの変化量も大きくなるのです。
しかし、駆動力を起源とするヨー角の発生には、当然、上限があります。ヨー運動は重心点を軸とした回転ですから、前輪にも後輪にも、ヨー角が増えた分と同量のSAが増加します。その結果として増加する後輪のCFは、駆動力によるヨーモーメントを打ち消す反対方向の力として作用します。だから、駆動力によるヨー角の変化は後輪のSAを超えることができません。一方、速度が上がることで遠心力も大きくなり、それに対応するCFを発生するためのSAも増加します。ですから、駆動力による後輪SAの増加分と、遠心力の増加によって必要となる後輪SAの増加分が一致した時点でヨー角は安定するのです。ヨー角の増加量=後輪SAの増加量です。
で、ここにステアリング特性が表れてきます。後輪SAの増加分と同量のSAが前輪でも増加するので、そのSAで発生するCFが、その速度で前輪が必要とするCFに対して、多過ぎたり少なかったりすることになるのです。つまり、前後輪が必要とするSAが異なる場合は、ヨーの変化が前後輪のCFのバランスを崩すことになり、それを補正するために、ステアリングを切り増したり切り戻したりしなければなりません。つまり「後輪SA-前輪SA」が、0か正か負か…が問題になるのです。もうお気づきですね。これは前回までにご説明したステアリング特性の定義と同じです。事実はひとつ、視点が変わっただけということです。
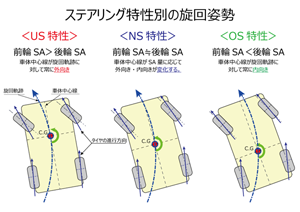
念のために復習すれば、NS特性車は前後輪にヨー角と同じ量のSAが増加しても、そのままの舵角で加速前の公転軌道を旋回できます。一方、US特性車は、本質的に後輪のSAが少ないうえに、速度が上がるにつれて後輪SAよりも前輪SAが大きくつく必要があるので、車体の進行方向が外側に膨らみ、ステアリングを切り増して、前輪にヨー角以上のSAをつけなければ、これまでと同じ軌道を保てないことになります。OS特性車は、後輪SAがもともと大きいうえに、前後輪にヨー角分のSAがつけば、前輪のSAが過剰となり、内向きに巻き込みます。なので、ステアリングを切り戻し、前輪SAを減らさないと曲がりすぎてしまうのです。
その加速状態からアクセルを少し戻し、一定の駆動力にとどめると、ヨーモーメントは、その時の遠心力とSAがついたことによるCFがバランスし、定常円旋回状態になります。もちろん、アクセルを踏み込んで加速して、一定量増やせば、更にSAがつくところでバランスします。車体に固定されている後輪のSAを車体ヨー角とみなして、自転的視点から言い換えれば、ステアリング特性とは、車体ヨー角の変化で生じる前後輪のSAのバランスの違いと言い換えることができると思います。
■重心位置とドライバーの視覚変化
さて、本来のテーマに戻ります。ヨー角の変化をドライバーはどのようにして感じるか…です。ひょっとしたら動物的な勘みたいなものを持つ人もいるかも知れませんが、前述のように、基本的には視覚情報に依存すると思います。そこで重要になるのが、ヨー回転の軸となる重心点とシート位置の関係です。試しに着座位置がほぼホイールベースの中間で、重心位置が異なる車に、同じヨー角が発生したとして、ドライバーが感じる視界の違いをみてみましょう。

重心位置が違えば、当然、ステアリング特性が異なるので、実際の運転ではヨー角も変わるのですが、問題を単純化するために、とりあえず停止状態でスピンさせるような想定です。また、駆動力によって発生するヨー角は極めて微小ですが、見やすくするために拡大しています。右図は、車体に対してドライバーの位置と視点の変化の関係を、右下図は、その結果としてのドライバーの視野の変化を図示しました。ヨー角が同じでも、それぞれの車でドライバーの視界の変化幅が異なることが分かると思います。
重心位置の近くに着座した時は、車のヨー角とほぼ同じだけ、フロントウインドーから見える景色も回転します。重心位置より後方に座れば、回転中心を後ろから眺めるので、フロントウインドー越しに見える景色の変化はロール角よりも少なくなります。重心位置の前方の着座位置では、逆に視点の移動量が大きく、視覚的には、凄く曲がる感覚になります。(キャブオーバートラックでハンドルを切った時、ものすごく切れる感覚になるのはこのためです。) このように、視界の変化幅は、実際の車のヨー角の変化とは必ずしも同じではなく、ドライバーの着座位置に応じて、場合によっては増幅されたり減少したりしているのです。

次に、このような視野の変化を現実の車に当てはめてみましょう。重心位置の違いはステアリング特性の違いに通じますから、これらの現象は、ステアリング特性別の視覚情報の違いということになります。重心点より後方に座るUS特性車では、この模式図でも視野の変化がヨー角より少なくなりますが、そもそも同じ駆動力を与えた場合のヨー角が小さく、進行方向も外向きに膨らみますから、視界移動はさらに減少し、視覚的にも「曲がらない感覚」が強くなります。OS特性車では、US特性車とはすべて逆の方向になりますから、ヨー角は大きく、進路は内側に切れ込み、視界移動が大きくなり、ドライバーに「曲がり過ぎる感覚」を与えることになります。NS特性車では、ヨー角と視野の変化角が同一ですし、進行方向も同一円周上を保ちますから、クルマの動きと視界の変化が合致して「素直に曲がっている感覚」となるわけです。いかがですか、それぞれのステアリング特性の持つ工学的事実と、ドライバーの視界から得る印象が、きちんと対応しているのが分かりますね。
■具体的な走行シーンを想定したシミュレーション
では、加速旋回時のステアリング特性の違いは、どの程度までドライバーの視覚情報に反映されるのでしょうか?動的感性という定性的な問題を、工学という定量的な手法で計算するのは極めて困難ですが、参考のために、実際の走行シーンにおける視界の変化を考えてみることにします。§13で使ったインターチェンジを例にして、C地点における視界に関する要素をB地点と比較したのが下表です。※少数点第3位まで表示してます。
この2地点間の移動には時間と距離があり、連続的に徐々に変化しているのですが、単純化するためにそれを無視しています。また、その間に行うはずの操舵に関しても、計算が煩雑になるため、その影響を省略しました。純粋にステアリング特性に応じて発生する車体進行方向の変化だけを見ようというわけです。正確な絶対値は得られませんが、特性の違いをイメージすることができます。(左右輪のSAは平均値、着座位置は車体センターと想定しています。)
| 項目 | ステアリング特性 | |||
|---|---|---|---|---|
| NS特性車 | US特性車 | OS特性車 | ||
| 車体進行方向の変化量(単位=度) (後輪SAー前輪SA) |
B地点 | -0.015 | -0.055 | 0.005 |
| C地点 | -0.035 | -0.095 | 0.010 | |
| C地点-B地点 | -0.020 | -0.040 | 0.005 | |
| 着座位置による視界の変化量 | 変わらない (±0) |
小さくなる (-α) |
大きくなる (+β) |
|
| ドライバーの視界範囲の変化量の合計 | -0.020 | -0.040-α | -0.005+β | |
車体進行方向の”+”は舵角を修正しなければ旋回軌道が内側に向きますから、ドライバーの視界を内側に移動させます。”-”なら外向きですから、視界の移動は少なくなります。この数値に着座位置の違いによる視界の変化(計算条件が面倒なのでそれぞれα、βとしました)を合計すれば、概念的には、ドライバーの動的感性に「曲がった!」という感覚を与える度合いの大小を示す数値になっていると思います。
前回の工学的なシミュレーションと同じで、数値的には極めて微小なレベルですが、傾向としては、ステアリング特性が人間の感性に与える影響を明確に示しています。US特性車は「曲がらない感覚」が強く、OS特性車は「曲がり過ぎる感覚」を与え、NS特性車は「素直に曲がっている感覚」となる根拠を、極めて大雑把にですが、ご納得いただけたでしょうか?腕に覚えがあって、クルマを振り回して走りたい人には、アクセルを踏み込むほど内向きの視界変化を強めるOS特性が歓迎されるかも知れませんが、王道はひとつです。「ストリートでベストなステアリング特性はNSである。」というCOOLな判断は、動的感性工学的なアプローチでも変わりません。

以上、ステアリング特性について長々とお話ししてきましたが、最後にそれらの知識をどのように実技に生かすか、いわゆるドライブテクニックとしてまとめておきます。先ほどと同じ半径のカーブを逆向きに接続させたS字のコース設定とします。このアニメーションでは、直感的に理解しやすいように、すべての要素を誇張して表現していますが、ステアリング特性に応じて、加減速によるヨーや進行方向の変化が異なりますから、ステアリング操作だけでなく、ブレーキやアクセルを踏むタイミングも変わります。その結果として、それぞれの特性に応じた走行ラインも変わるのです。
自動車専門誌のドラテク講座などでも取り上げられることの多いテーマですが、ここまでの講義をきちんとフォローされた皆さんには「どうしてそうなるのか?」ということが、容易にご理解いただけると思います。学校の勉強と同じで、結果を丸暗記しただけの知識はあまり役には立ちません。その理由やプロセスをイメージしながら、リアルタイムでクルマと対話しながら走ることで、初めて本当の「人馬一体」のドライブを体感していただけるようになると思います。
■動的感性工学の視点で考える運転技術&自動車技術
ここまで、ヨー角と視覚変化を題材に動的感性工学の入り口みたいなものを解説してきましたが、最後にもう少しテーマを広げて、皆さんの運転技術や関連する自動車技術などについて、動的感性工学の視点から、参考になりそうなポイントをアトランダムにお話ししておきたいと思います。

例えば、車が曲がるためにヨーは必要ですが、それは車の安定という面では、大きな不安定要素です。高速道路を走っていても車がフラフラするということの原因はヨーなのです。車線変更の時にもうまく収束させないと、ヨーが原因で後輪が滑ってスピンし事故を起こす要因となっています。4WSがついていれば、ヨーは発生せず、安定した状態で並行移動するように車線変更ができます。私が2代目のRX7(FC3S)で4WSを実践したのは、その安定性を取り入れてみるためでした。ヨー角“0”でもスリップ角をとれるシステムでしたが、それで走ってみて分かったことは、人間は曲がるときにヨー角をつけたい、車線変更も向きを変えてからしたい、ということでした。だから、4WSの機能は感性的には面白くなくて、大きな違和感があったのだと思います。
また、ヨーの変化は、機敏に動いて、そのあと機敏に止まるのが良いと思っています。操縦安定性で一番重要なのが、この機敏に止まるということ、すなわち発生したヨーをいかに素早くスムースに安定させるかということです。ヨーを安定させるのはCFです。ホイールベースが長いと、ヨーは安定しますが、ヨーが出るまでに時間がかかります。一方、ホイールベースが短ければ、ヨーは素早く出ますが、安定しません。実際はトレッドとホイールベース、重心位置の関係をどう設計するかということが重要であり、剛性だったり、CFに関与するサスペンションのセッティングも大きく影響してきます。
究極のヨーコントロールと言えば、やはりモータースポーツです。なぜなら、駆動力で積極的に向きを変えることが、速さに直結するからです。たとえば、ラリードライバーは、ブレーキングやアクセルワークによって積極的にヨーをコントロールしています。意図的にドリフト走行させたリアタイヤに働く車速方向への慣性力と、強くロックさせたフロントタイヤのマイナスの駆動力で重心点回りに大きなヨーモーメントを生み出し、フロントタイヤを支点にして、一気に向きを変える走りをしたりします。また、レーシングカーは、向きを変えやすくするために、オーバーステア特性になるよう設計してあります。F1にしてもルマンの車にしてもリアヘビーです。要はコーナーの途中で少しでも速く車体を出口に向けて、アクセルを踏み込みたいからなのです。

そういった競技ドライバーでなくても、例えばFR車では、前輪はステアリング操作によってスリップ角を変えてCFの大小を変えられます。後輪はアクセルワークでタイヤのCFと駆動力のバランスを変えられます。 静止状態でハンドルを切ったままアクセルをふかして、クラッチを繋げばスタンディングスピンができますね。これはFRにしかできない究極の旋回です。スリップ角によるCFと駆動力による摩擦円のコントロールの要素がシンプルに分かれているからこそできることなのです。
FF車の場合、前輪に駆動力を加えると前輪が外へ出ていきます。一方、アクセルを緩めたら、元の旋回円に戻って来ることができます(タックインと呼ばれている挙動)。それを利用して、コーナーでヨーをコントロールするという方法があります。ただし、FF車は駆動輪と操舵輪が一緒なので複雑です。例えば前輪のCFが減る=曲がらない原因は2つあります。ひとつは駆動力を上げすぎたオーバートラクション。もう一つは過剰な舵角です。それらは同時にやってしまうことが多いので、アクセルと舵角のどちらが原因なのか、両方なのか、がよく分からないということになりがちです。
では4WDはどうかと言うと、もっと複雑です。ドライバーがアクセルで後輪をすべらせて車の向きを変えようとしても、その意志とは関係なく、車が勝手にトルク配分して駆動力の前後配分の比率が変わったりするからです。
それは人間にとって、自分の操作に対する明確な効果がつかみにくいという意味で動的感性としては、しっくりこないということになります。
感性工学的な運転技術を磨くという意味では、車体ヨーの立ち上がり(車が回り始めること)を意識して運転してみてください。それを体感して、次に素早くヨーを収束させる、ヨーをコントロールする走り方ができるようになると、そこにもっと密接な人馬一体感が生まれるはずです。人間の操作に対して車体が反応する、その反応をきちんと感じて、次の操作を行う。そのやりとりの間に、これだけ切るとこの車はこう動くのか、ということを把握し次の操作にフィードバックしてゆくのです。
動く量に満足すれば、それで終了ですが、気に入らなかった場合は、また操作し、その反応を感じるということを繰り返すことになります。これをクローズドループと言います。その繰り返しが少なくて済む、人間の操作に対して車が期待通りの反応をするという良い関係こそが、人馬一体感を形作るのです。
このクローズドループに対して、オープンループというのは、人の操作が入らない、車の「素(す)」の特性のことを言います。例えば走行中に急激にステアリングを切って(ヨーを入れて)、バっと離して放置して車がどうおさまるかをテストしたりします。その車固有のヨー角振動数(§11参照)もそのひとつです。

実際の走行シーンでは、路面からの入力や横風といった外からの刺激があります。それは人間の操作によるものではありません。その入力に対して、ある車はフラフラして安定してくれない。ここまではオープンループですが、そこでドライバーが操作して安定させます。そこはクローズドループです。ですから、車とドライバーの関係はセミオープンループだとも言えます。もちろん車がよい性格(特性)を持っていることがベターですが、どちらかからの一方通行ではなく、対話(操作、反応)を繰り返すことで、ドライバーがその車の性格やクセを早く把握できれば、後の反応は期待通りのはずです。そんな対話を楽しんで得られる、あうんの呼吸は、動的感性の重要なファクターです。
ドライバーが感じる「意のまま」というのは、ドライバーの操作に対して、たとえ身体能力を拡大する装置の性能が上がっても、拡大する前のオリジナルの反応、人間の感覚からズレない反応がある、ということだと思います。
また、能力が拡大して危険度が増した分だけ、タイヤの横剛性、CFの車体への伝わり方、シートの剛性、前後輪の関係、車体剛性など、ドライバーの操作に対するレスポンスに関係する特性の性能もアップさせ、インフォメーション量も拡大させるべきです。自分の足で走ってコケたら、擦りむいた!で済みますが、100km/hで走ってコケたら命の危険があるのです。命を脅かすコケ方をしそうだと、ドライバーに早く感じさせる車でないと危ないのです。
私は、ひょっとすれば語弊があるかも知れませんが、最新の電子制御満載の車のようにドライバーの意思とは関係ないところで制御している車は危険だと思います。トラクションコントロールや自動減速システムなどによって、走行中に何かあっても何とかなると信じ込まされ、人間はただ乗せられているだけになって、操縦の意識がどんどん薄くなっています。しかも、プログラムのロジックから外れれば、あとは自分でやりなさい!と突き放される中途半端感が否めません。私は、そういった最新のシステムは掛け捨て保険だととらえ、一生使わなくて済むような乗り方をして欲しいと思っています。運転している間はとにかく楽しくて、脳を活性化して、絶対に居眠りなんかせんぞ!という魅力をもった車のほうが、よっぽど安全だと私は信じています。それは、思い通りに動いて楽しくて、また乗りたいと思う、ロードスターのような車なのではないか…と。