チューニングを楽しむための動的感性工学概論 §13
ステアリング特性詳論…前後輪タイヤのスリップアングルを計算する。
§11・12では、旋回運動の原理・原則を理解していただくために、できるだけシンプルな運動状況を設定して、その概略を講義しました。しかし、加速しながら旋回する実際の運転では、内外輪および前後輪の間で荷重移動が起き、その結果としてタイヤの特性が(わずかですが)変化します。それに対して、車の質量や重心位置は物体に固有の特性として不変なので、前後輪に働く遠心力や、それにバランスするCF(コーナーリングフォース)の比率は変わりません。旋回運動に関わる動的感性の主要なテーマの一つであるステアリング特性には、このように、状況によって変化するものと変化しないものが関係しているのです。だから、必要なCFを得るためのSA(スリップアングル)の検証や、結果としてのステアリング特性を判定するのには、もう少し複雑な作業が必要になります。そこで、本章では、今までに講義した旋回メカニズムの復習も兼ねて、車に働く加速度とそれに対応するSAを計算し、ステアリング特性への影響を確かめることにします。もちろん、厳密な意味では、詳細な設計要素を無視したアバウトな数字ですし、難解な計算式は簡略化しています。
普通の人が、普通の車を、普通に運転するのには必要ない知識かも知れませんが、ステアリングやアクセルの操作が車の挙動に与える影響を具体的にイメージすることは、チューニングを志す皆さんにとって、きっと役に立つはずです。運転を楽しむ感性に、車の動きを理解する知性が加われば、それこそ鬼に金棒。より緊密な人馬一体感が生まれると思います。今回も面倒な理屈や計算が続きますが、頑張って最後までお付き合いくださるようお願いします。
■円運動の基礎知識
旋回中の車に働く加速度によるステアリング特性への影響(前後輪のSAの変化)を確かめるには、車体に加わる遠心力、荷重移動量、そして前後輪のタイヤに求められるCFを算出する必要があります。先ずは、そのための基礎知識を説明します。
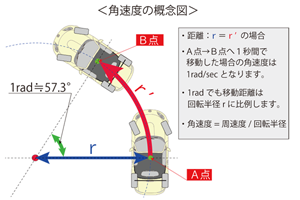
最初に、遠心力を計算する時に必要な「角速度」と「弧度法」についてです。直線運動の速度は「距離/時間」ですが、角速度は時間当たりの回転角、つまり「角度/時間」です。一般的に、回転角は「度数法」を使い1回転を360°で表しますが、技術分野では各種の計算に便利な「弧度法」を用います。比率なので単位はありませんが、その数値をrad(ラジアン)と規定することになっています。従って、角速度は、「rad/sec」ということになります。
もう少し詳しく説明すれば、radは円周上の距離と半径の比です。その角度で挟まれた円弧が半径の何倍かという数値です。円全体(360°)の円弧(円周)の長さは2πrですから、それをrで割れば360°=2πradということになります。よって、1rad=180°÷πで約57.3°という関係です。この関係を利用すれば、角速度は円弧上を1秒間に移動する距離(=周速度:m/sec)を回転半径(m)で割ることで得られます。
・角速度(rad/sec)=周速度(m/sec)÷回転半径(m)
角速度は円周上の移動速度に比例し、半径に反比例するというわけです。逆に見れば、速度は角速度と半径の積で、それぞれに比例します。技術計算がしやすくなるのがお分かりいただけると思います。
次は、遠心力を求めるために必要な「遠心加速度」です。本来、「遠心力」は架空の力で、旋回中心に向かって発生する「向心力」の反力です。大きさが同じで方向が反対のベクトルなので、とりあえず向心力を計算することから始めます。
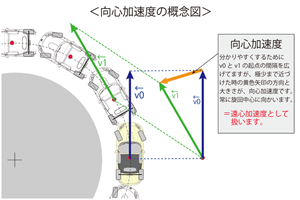
「向心加速度」の概念を説明します。
右図のような定速で円運動をしている車には、加速度は加わっていないと思われがちです。しかし、実際は直線方向へ進もうとする慣性力(青矢印)に対し、旋回中心へ向かって、絶えず向きを変えようとする加速度(黄色矢印)が働いているのです。
その結果として、車は円周に沿って緑矢印の方向に進行することになります。糸に重りを繋いで回した時に、糸が重りを引っ張っている状態と考えてください。
その加速度の大きさは(途中の理屈は難解なので省略しますが)、以下の数式で得られます。
・向心加速度(m/sec2)=旋回半径(m)×角速度(rad/sec)2
次は、「向心力」の計算です。
力の大きさは直線上の運動方程式と同じで、質量×加速度(この場合は上記の向心加速度)です。
・向心力(N:ニュートン)=車の質量(kg)×向心加速度(m/sec2)
この向心力を作り出しているのがタイヤのCFです。一般的には「遠心力に対抗するのに必要なCF」と表現されますが、この計算式を前提にすれば、私たちが感じている遠心力は「CFによる向心力の反力」ということがお分かりいただけると思います。ただし、それにこだわる必要はありませんから、ここから先も、この向心力の反対向きの力を遠心力として扱い、旋廻運動に必要なCFを、その遠心力に等しい反対向きの力として計算を進めることにします。
■走行条件の設定
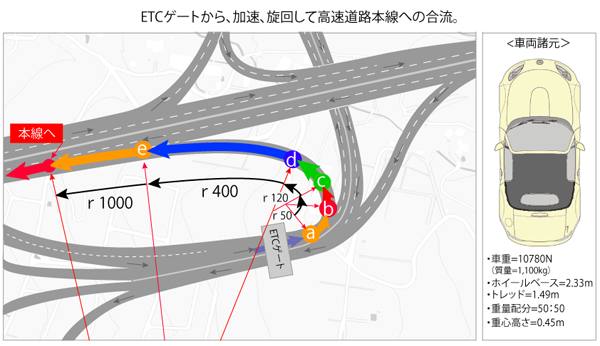
ステアリング特性に影響する前後輪タイヤのSAを具体的に検証する例題として、日常的なドライブシーンを設定してみます。下図は、高速道路のインターチェンジで、ETCゲートから加速して本線へ合流する場面のサンプルです。実際のインターチェンジは、もっと複雑なカーブで構成されていますが、ここでは、遠心力や加速状態の変化をできるだけ容易に解説すべく、旋回半径が異なる4つの円弧がつながった構成としました。各区間の半径、車速等の条件は下表とし、計算に必要な車両諸元も列記しておきます。この車は前後輪の重量配分が等しいので、基本的にNS(ニュートラルステア)特性です。
冒頭でも触れましたが、実際にはもっと多くの要素を組み込んだ計算と、それに対応する工学的な工夫が関係するのですが、それらを全部網羅すると話が複雑になり過ぎて消化不良になる危険がありますから、これ以降の計算は単純化したシミュレーションと受け取ってください。
| 項目 | 単位 | 地点 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| a | → | b | → | c | → | d | → | e | → | 本線 | ||
| 回転半径 | m | 50 | 50 | 120 | 400 | 1000 | 直線 | |||||
| 速度 | km/h | 20 | 等速 | 20 | 加速 | 40 | 加速 | 60 | 加速 | 100 | 等速 | 100 |
| m/sec | 5.56 | 5.56 | 11.11 | 16.6 | 27.78 | 27.78 | ||||||
| 経過時間 | sec | 4.00 | 2.00 | 2.50 | 6.50 | 3.10 | ||||||
■遠心力の計算
前出の公式を使って遠心力を求めます。前後のタイヤに働く遠心力を知りたいわけですから、車の質量を前後軸に分けて計算します。この例では、前後の重量配分が50:50の設定なので、それぞれ550kgずつということになります。また、条件を簡素化するために、各区間を同一半径とし、区間内での前後加速度も一定として、各地点を通過する時の瞬間的な数値を求めることにします。念のために計算式を再記しておきます。
・角速度(rad/sec)=周速度(m/sec)÷回転半径(m)
・遠心加速度(m/sec2)=旋回半径(r)×角速度(rad/sec)2
・遠心力(N:ニュートン)=車の質量(kg)×遠心加速度(m/sec2)
各地点の走行条件をもとに計算した結果です。
| 項目 | 単位 | 地点 | ||||
|---|---|---|---|---|---|---|
| a | b | c | d | e | ||
| 角速度 | rad/sec | 0.11 | 0.11 | 0.09 | 0.04 | 0.03 |
| 遠心加速度 | m/sec2 | 0.62 | 0.62 | 1.03 | 0.69 | 0.77 |
| 前軸遠心力 | N | 339.51 | 339.51 | 565.84 | 381.94 | 424.38 |
| 後軸遠心力 | N | 339.51 | 339.51 | 565.84 | 381.94 | 424.38 |
これで、前軸・後軸にかかる遠心力が分かりましたので、次は4輪の荷重を計算します。§12で講義した通り、タイヤのCF特性は輪荷重によって変化するためです。
■輪荷重の計算。
内外輪間の移動量の計算式は、重心点に働く遠心力×重心高=荷重移動量×トレッドという関係から求められます。
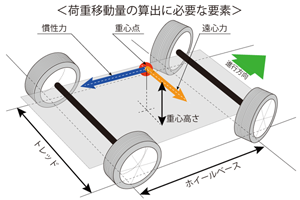
・内外輪荷重移動量=遠心力×重心高÷トレッド
アクセルを踏みながらの加速ですから、前後方向にも加速度によるモーメントが発生していますが、考え方は同じで、「トレッド」が「ホイールベース」に変わるだけです。
・前後輪荷重移動量=慣性力 (前後加速力の反力)×重心高÷ホイールベース
具体的な計算の例としてC地点の荷重移動量を算出してみることにします。前後加速度は車速変化を経過時間で割って得た数字です。
・左右方向の荷重移動量=1.03(遠心加速度)×1100(質量)×0.45(重心高)÷1.49(トレッド)≒342N
・前後方向の荷重移動量=2.22(前後加速度)×1100(質量)×0.45(重心高)÷2.33(ホイールベース)≒472N
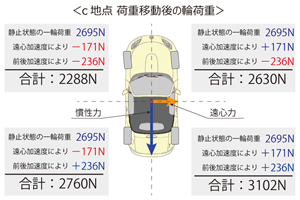
次に、静止状態から加減算して荷重移動後の輪荷重を求めます。ただし、ここで扱っているのはタイヤと路面の関係ですから、静止状態の車両の質量(kg)を重量(N)に換算して単位を合わせなければなりません。地球の引力による「重力加速度=9.8m/sec2」を掛け算しておきます。各輪の輪荷重は右図となります。
・静止状態の1輪荷重=10780N(車重)÷4輪=2695N
・左右方向:内両輪→外両輪に342N
(1輪あたり171N)移動。
・前後方向:前両輪→後両輪に472N
(1輪あたり236N)移動。
■CFの算出とSAの読み取り。
同様に各地点の輪荷重を算出して、必要なCFの計算に移ります。タイヤは輪荷重によって、同じSAが発揮するCFの大きさが変わります。それぞれのタイヤがどれだけのCFを稼ぎ出しているのか、本来、単純には計算できませんが、微小なSA領域の場合は輪荷重とCFが比例するとみなして、各輪の荷重比率に合わせて計算することができます。具体的な計算の例として、同じくC地点でのCFを算出してみることにします。
前輪CFは、前軸遠心力に前輪間の荷重比率を掛けて算出します。
・前右タイヤのCF=565.84(前軸遠心力)×0.535(荷重比率)≒302.72N
・前左タイヤのCF=565.84(前軸遠心力)×0.465(荷重比率)≒263.11N
後輪CFは、後軸遠心力に後輪間の荷重比率を掛けて算出します。
・後右タイヤのCF=565.84(後軸遠心力)×0.531(荷重比率)≒300.46N
・後左タイヤのCF=565.84(後軸遠心力)×0.469(荷重比率)≒265.37N
以下、同様に各地点の各タイヤのCFを算出します。
| タイヤ | 地点 | |||||
|---|---|---|---|---|---|---|
| a | b | c | d | e | ||
| 前輪 | 右 | 176.21 | 177.01 | 302.72 | 199.74 | 222.28 |
| 左 | 163.29 | 162.50 | 263.11 | 182.21 | 202.10 | |
| 後輪 | 右 | 176.21 | 175.57 | 300.46 | 198.63 | 222.28 |
| 左 | 163.29 | 163.93 | 265.37 | 183.31 | 202.10 | |
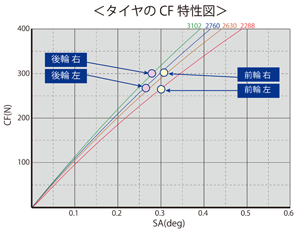
さて、いよいよ最後です。
右図は説明用のサンプルですが、C地点を例に、各タイヤの輪荷重(グラフ上部欄外の数字)に応じた性能曲線から、それぞれのCFを発生するSAを読み取ります。
とてもアナログ的な手法なので、厳密な数値の評価は避けたいのですが、前後輪のSAはほぼ0.3°前後で、前後輪の差は0.05°以内でしょうか。つまり、前輪のSAがかすかに大きい弱アンダーなステアリング特性だということの証明です。
同様にして各地点のSAを読み取ります。左右輪で微妙に異なりますが、下表はその平均値です。
| タイヤ | 地点 | ||||
|---|---|---|---|---|---|
| a | b | c | d | e | |
| 前輪 | 0.17 | 0.17 | 0.31 | 0.19 | 0.21 |
| 後輪 | 0.17 | 0.16 | 0.27 | 0.18 | 0.21 |
| 前後輪のSA差 (後輪SAー前輪SA) |
0 | -0.01 | -0.04 | -0.01 | 0 |
a及びe地点では、「前輪のSA=後輪のSA」となり、完全なNS特性ということが分かります。一方、b~d地点のように車体前方へ加速度が加わると、「前輪のSA >後輪のSA 」になり、微少なUS(アンダーステア)特性が見られます。
■重量配分の影響
比較のために、次は前後の重量配分が異なる車で同じ旋回運動をした場合を計算してみます。
NS特性車とは重量配分のみの違いとし、他の諸元、各区間の速度や加速度は同一とします。
・重量配分を「前軸:後軸=60:40」とした車での旋回
質量・重量の数値を前軸:後軸=60:40に変更して計算し、対応するSAを読み取ると下表になります。
| タイヤ | 地点 | ||||
|---|---|---|---|---|---|
| a | b | c | d | e | |
| 前輪 | 0.18 | 0.19 | 0.33 | 0.22 | 0.23 |
| 後輪 | 0.15 | 0.14 | 0.24 | 0.16 | 0.20 |
| 前後輪のSA差 (後輪SAー前輪SA) |
-0.03 | -0.05 | -0.09 | -0.06 | -0.03 |
全区間で「前輪のSA >後輪のSA 」となっています。これはUS特性車の特徴です。
・重量配分「前軸:後軸=40:60の車での旋回
今度は質量・重量の数値を前軸:後軸=40:60に変更して計算し、対応するSAを読み取ると下表になります。
| タイヤ | 地点 | ||||
|---|---|---|---|---|---|
| a | b | c | d | e | |
| 前輪 | 0.15 | 0.17 | 0.29 | 0.18 | 0.19 |
| 後輪 | 0.18 | 0.18 | 0.30 | 0.20 | 0.23 |
| 前後輪のSA差 (後輪SAー前輪SA) |
0.03 | 0.01 | 0.01 | 0.02 | 0.04 |
全区間が「前輪のSA <後輪のSA 」となっています。これがOS(オーバーステア)特性車の特徴です。以上の考察を通して得られた結論をまとめてみましょう。
重量配分の異なる(結果的にステアリング特性が異なる)3車のC点におけるSAを、タイヤのCF特性との関係で比較したのが右図です。US・OS特性車は、NS特性車に比べて前後輪のSAが離れた領域に分布していることが分かります。前後輪のSAの差は「ステアリング特性の違いを示す明確な指標」だということです。
・前輪のSA >後輪のSA……US特性
・前輪のSA =後輪のSA……NS特性
・前輪のSA <後輪のSA……OS特性
■計算結果の図解
以上で、原理的な計算は終わりです。ステアリング特性は旋回時の前後輪のSA差で確認でき、その特性を決める基本的な要因は前後輪の荷重配分であることが、計算の過程でご納得いただけたと思います。
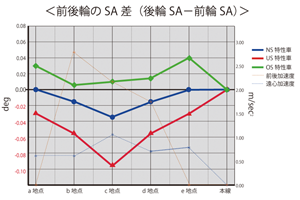
しかし、理屈と計算だけではピンとこないという方のために、前記シミュレーションの結果をビジュアル化してお見せすることにします。縦軸左が前後輪のSA差(後輪SA-前輪SA)、縦軸右が加速度、横軸は通過した設定地点です。それぞれのステアリング特性がより明確にイメージできると思います。
前輪のSAは舵角を減らす方向に作用し、後輪のSAは車体を内側に傾けて舵角を増やすのと同じ効果を示すので、後輪SA-前輪SAが+ならOS、-ならUS、完全なNS状態ならば0ということになります。つまり、このケースでは、各通過地点の走行条件に応じて、OS車は最大で0.04°近くタイヤの舵角を戻す必要があり、US車では0.1°程度、NS車は0.04°くらいまで、増やす必要があると理解してください。
さらにもう一つのグラフをお見せします。既にお気づきの方も多いと思いますが、このような日常的な運転では、各輪のSAは0.5°未満であり、前後輪のSA差は0.1°未満の極めて微小な角度です。そんな範囲の数値を比較することに意味があるのか…という疑問が湧くかも知れません。
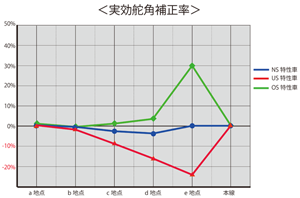
そこで実舵角(前輪と車体の角度)と、SAの影響を加味した前輪タイヤと車体の各進行方向の角度(仮に実効舵角と規定します。実舵角+後輪SA-前輪SAです。)を比較してみます。絶対値ではなく、比率として考えようというわけです。状況に応じて舵角を戻したり増やしたりする補正率ですから、このグラフの方が、よりドライバーの実感に近いと思われます。
・実舵角(deg)=SAが発生しない幾何的な舵角として計算
(sin θ=ホイールベース÷回転半径)
・実効舵角(deg)=実舵角+後輪SA-前輪SA
・実効舵角補正率(%)=(実効舵角-実舵角)÷実舵角
ステアリング特性に応じたグラフの傾向は変わりませんが、舵角補正率は、最大30%にもなることが分かります。前出の小数点以下の細かい数字が持つ「大きな意味」がお分かりいただけると思います。
■動的感性との関連性
ステアリング特性を動的感性から見れば、カーブの曲率に対して直感的な舵角決定で曲がれるか、意識的に修正を加えなければならないか…ということです。途中でステアリングを大きく切り増したり、逆に戻したりして修正する必要があれば、操舵するたびに違和感や不安感が生まれます。だから、ステアリング特性は弱アンダー傾向が良いというのが定説になっています。修正が必要な場合でも転舵の方向が変わらず補正率も少ないので、ドライバーが安心して対応できるからです。また、高速道路などのコーナーでは、直進状態から徐々に舵角をあてていき、頂点を通過した後はステアリングを穏やかに戻して自然に本線へ合流できるように、道路の設計にも配慮が盛り込まれています。緩和曲線とか、クロソイド曲線と呼ばれています。私としては、より積極的に運転を楽しむという観点から、基本はNSで、走行条件によって弱USになるのが理想だと考えています。
しかし、理屈は理解できたとしても、実際に車を操縦するドライバーは、このような1°未満の舵角補正を直接的にコントロールすることはできません。そこで、タイヤ舵角とステアリング舵角の間には適度なギア比が設定されています。1°未満の世界を拡大して扱いやすくしているのです。仮にギア比を24:1とすれば、タイヤ舵角の1°は、ステアリング上では24°になるという意味です。時計の文字盤で示せば長針の4分程度の角度にまで広げているのです。これなら、視覚的にも腕の動きとしても十分にコントロール可能です。そのギア比をどの程度にするかは、それこそ動的感性工学的にも重要なテーマです。拡大し過ぎれば俊敏な操作ができませんし、過敏すぎれば神経質で不安定な感覚を与えるからです。もちろん、その前提になるのは、ドライバーが身体の延長であるかのごとく、タイヤの向きを0.1°未満の世界でも的確にコントロールできるような車両トータルの(あるいはシステム細部の)最適設計と、走行実験による感性評価の反映という開発プロセスが欠かせません。
以上、しつこいまでに細かな数字を連ねて説明してきましたが、読者の皆さんが、実際のドライブでの印象を、このようなデータで確認していただけたら嬉しいと思います。ステアリング特性を支配しているのは、実はミクロの世界のメカニズムです。だからこそ、サスペンションのアライメントや、ボディの剛性、ステアリング系統の剛性、さらにはタイヤの空気圧などには、それに対応するミクロの精度が求められるのです。車を愛し、運転することを楽しみ、さらなる人馬一体感を求めてチューニングを志す皆さんが、単に運転技術や感性を磨くだけでなく、自動車工学の基本的な知識を身につける(それがこの講座の狙いでもあるのですが)と共に、日頃から愛車の状態をベストに保つメンテナンスを心掛けていただきたいと、心から期待したいと思います。